The Persistent Promise of Humanoid Robots: Progress, Challenges, and the Quest for Versatility
Humanoid robots are making remarkable technological strides, advancing in locomotion and sensing capabilities while confronting complex challenges in versatile manipulation. The journey toward truly adaptive robotic systems continues to be a fascinating exploration of technological potential.
Humanoid robots continue to capture our collective imagination, advancing in waves of technological sophistication that hint at transformative potential while simultaneously revealing the complexity of creating truly versatile machines. Each technological wave arrives with increasingly smooth locomotion, enhanced balance, and more confident predictions about general-purpose capabilities.
The journey of robotic development resembles the persistent pursuit of fusion energy—genuine scientific progress marked by steady advances and real breakthroughs, yet consistently pushing practical implementation further into the future. Researchers and engineers repeatedly promise machines that can safely share human spaces and perform diverse everyday tasks, a vision that has tantalized technologists for decades.
My peripheral engagement with robotics revealed the intricate challenges beneath surface-level demonstrations. Years of exploration through simulations, academic literature, and collaborative research exposed the vast distance between theoretical potential and practical implementation. Even in controlled laboratory environments, the gap between theoretical models, computer simulations, and physical hardware remained substantial.
Locomotion represents the most dramatic area of robotic advancement. Modern bipedal robots can now walk, run, jump, and dynamically recover from unexpected disturbances. Quadrupedal designs navigate challenging terrain with remarkable agility, while hybrid wheel-leg systems combine rolling efficiency with obstacle-traversing capabilities. These achievements are evident in research laboratories across Western and Chinese institutions, representing technological capabilities that would have seemed extraordinary merely two decades ago.
However, movement alone does not guarantee utility. Most home and business environments demand sophisticated manipulation—interacting with doors, drawers, tools, dishes, and delicate objects. This realm presents far more complex challenges than locomotion. Human hands represent an extraordinarily sophisticated system combining strength, precise force control, dense tactile feedback, and rapid subconscious adjustments—capabilities that remain incredibly difficult to replicate artificially.
Touch represents a particularly challenging sensory modality for robotic systems. Unlike vision or hearing, tactile information is inherently local and invasive, only becoming available after physical contact occurs. Furthermore, there is no standardized global representation of touch comparable to visual pixels or audio waveforms, and no comprehensive libraries of tactile data from which machines can learn.
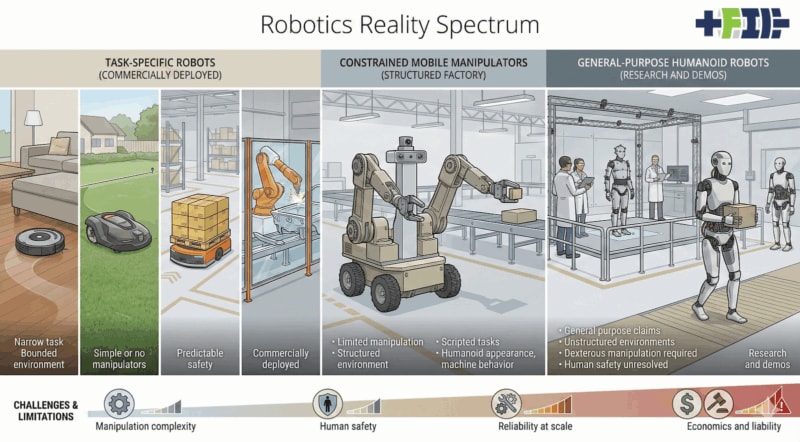
Industrial robots currently circumvent these challenges by operating in highly structured environments with known objects, fixed positions, and rigid fixtures. Yet the dream of truly adaptable, general-purpose humanoid robots remains tantalizing—a technological frontier promising revolutionary human-machine collaboration that continues to inch forward, one incremental breakthrough at a time.
Based on reporting by CleanTechnica
This story was written by BrightWire based on verified news reports.
More Good News
 🚀 Innovation
🚀 InnovationElectrifying Deal: Dodge Charger EV Slashes Prices by Nearly 50%
 🚀 Innovation
🚀 InnovationCATL's Sodium-Ion Battery Revolution: A Breakthrough in Electric Vehicle Technology
 🚀 Innovation
🚀 InnovationHome Tech Revolution: 5 Breakthrough Innovations That Are Changing Everyday Living
Start Your Day With Good News
Join 50,000+ readers who wake up to stories that inspire. Delivered fresh every morning.
No spam, ever. Unsubscribe anytime.